Congratulations to Zhenyu Hou: IROS 2025 paper accepted for oral presentation
Congrats to Zhenyu Hou — our IROS 2025 paper was accepted for an oral presentation.
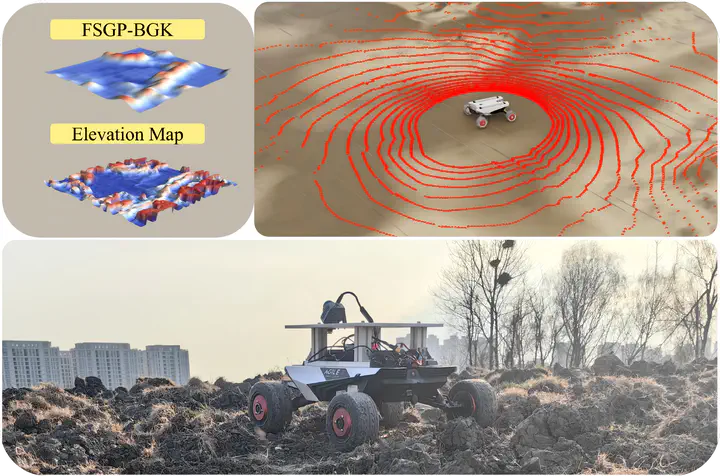
Terrain analysis is critical for deploying ground mobile robots in real-world tasks, especially in outdoor, unstructured environments. In this paper, we propose a novel spatio-temporal traversability assessment method that enables autonomous robots to navigate complex terrains effectively. Our approach uses sparse Gaussian processes (SGP) to extract geometric features (curvature, gradient, elevation, etc.) directly from point-cloud scans, which are then fused into a high-resolution local traversability map. We further design a spatio-temporal Bayesian Gaussian kernel (BGK) inference method to dynamically evaluate traversability scores by integrating historical and real-time data while accounting for slope, flatness, gradient, and uncertainty. With GPU-accelerated feature extraction, the system achieves real-time performance. Extensive simulation studies across diverse terrain scenarios show that our method outperforms state-of-the-art (SOTA) baselines in both accuracy and computational efficiency. Finally, we build an autonomous navigation framework around the traversability map and validate it on a differential-drive platform in complex outdoor environments. Our code will be open-sourced at github.com/ZJU-FAST-Lab/FSGP_BGK.